Автоматическая кормушка
Проект для братьев наших меньших
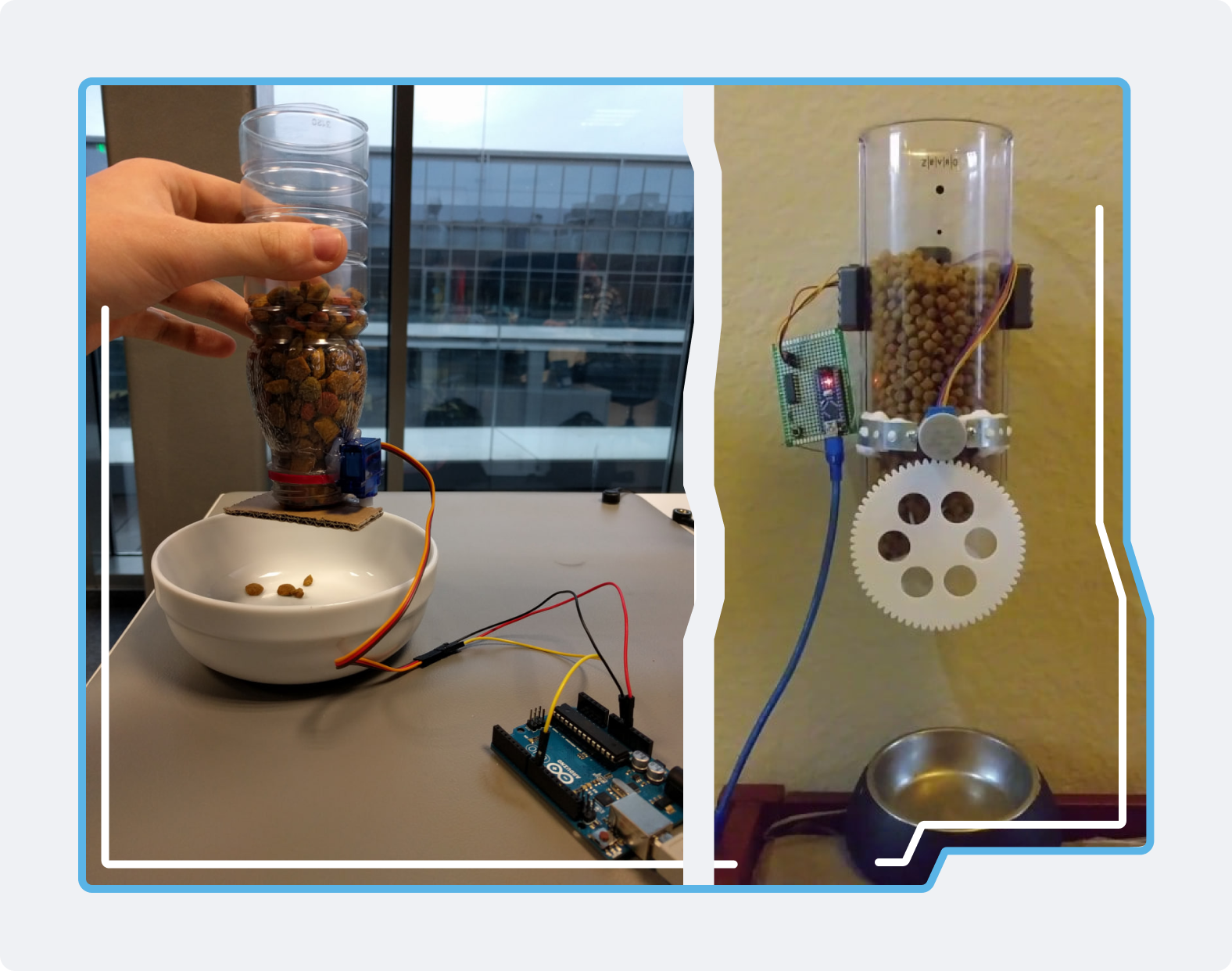
Устройство автоматической кормушки основано на подаче корма с определенной периодичностью.
Такой прибор можно применить в аквариуме, кормушке для птиц или для домашнего питомца.
Вам понадобятся картон, пластиковая бутылка или емкость, в которую можно будет насыпать корм. А также знакомые сервопривод и плата ENJOY BOARD. Для сборки этого устройства можно попросить помощи кого-нибудь из близких — этот процесс может стать увлекательным для всей семьи!
Устройство автоматической кормушки основано на подаче корма с определенной периодичностью.
Такой прибор можно применить в аквариуме, кормушке для птиц или для домашнего питомца.
Вам понадобятся картон, пластиковая бутылка или емкость, в которую можно будет насыпать корм. А также знакомые сервопривод и плата ENJOY BOARD. Для сборки этого устройства можно попросить помощи кого-нибудь из близких — этот процесс может стать увлекательным для всей семьи!
Необходимые компоненты:
Все детали в одном наборе:
Купить по отдельности:
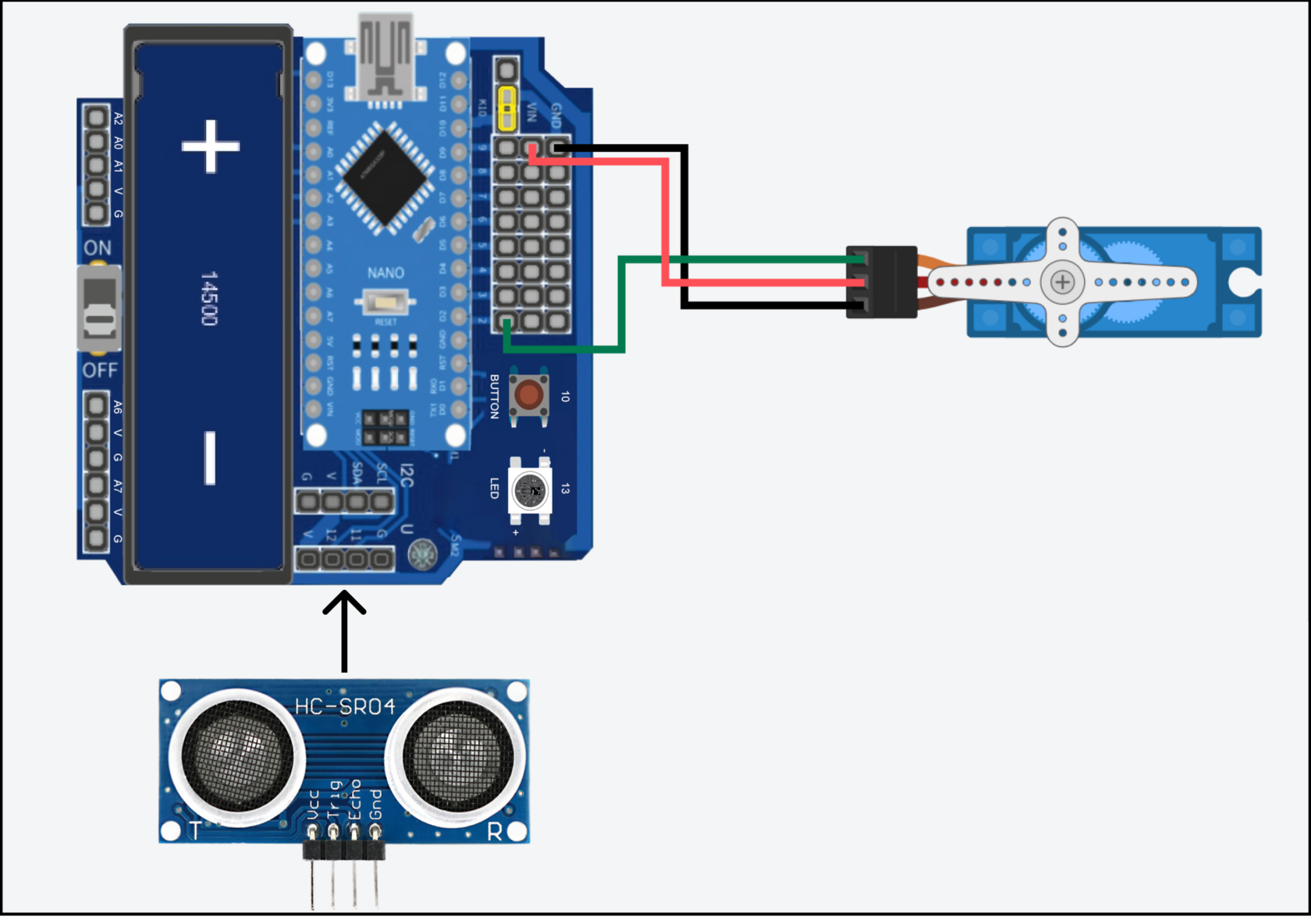
Схема подключения
Соберем схему с применением сервопривода, трех соединительных проводов, ультразвукового дальномера и платы ENJOY BOARD.
! Каждый раз при сборке схемы проверяйте, чтобы переключатель на плате ENJOY BOARD был в положении OFF (выключено).
Откройте программу Enjoy Block. Если у вас её нет, то можете скачать по кнопке ниже:
Составьте программу из блоков, как показано ниже
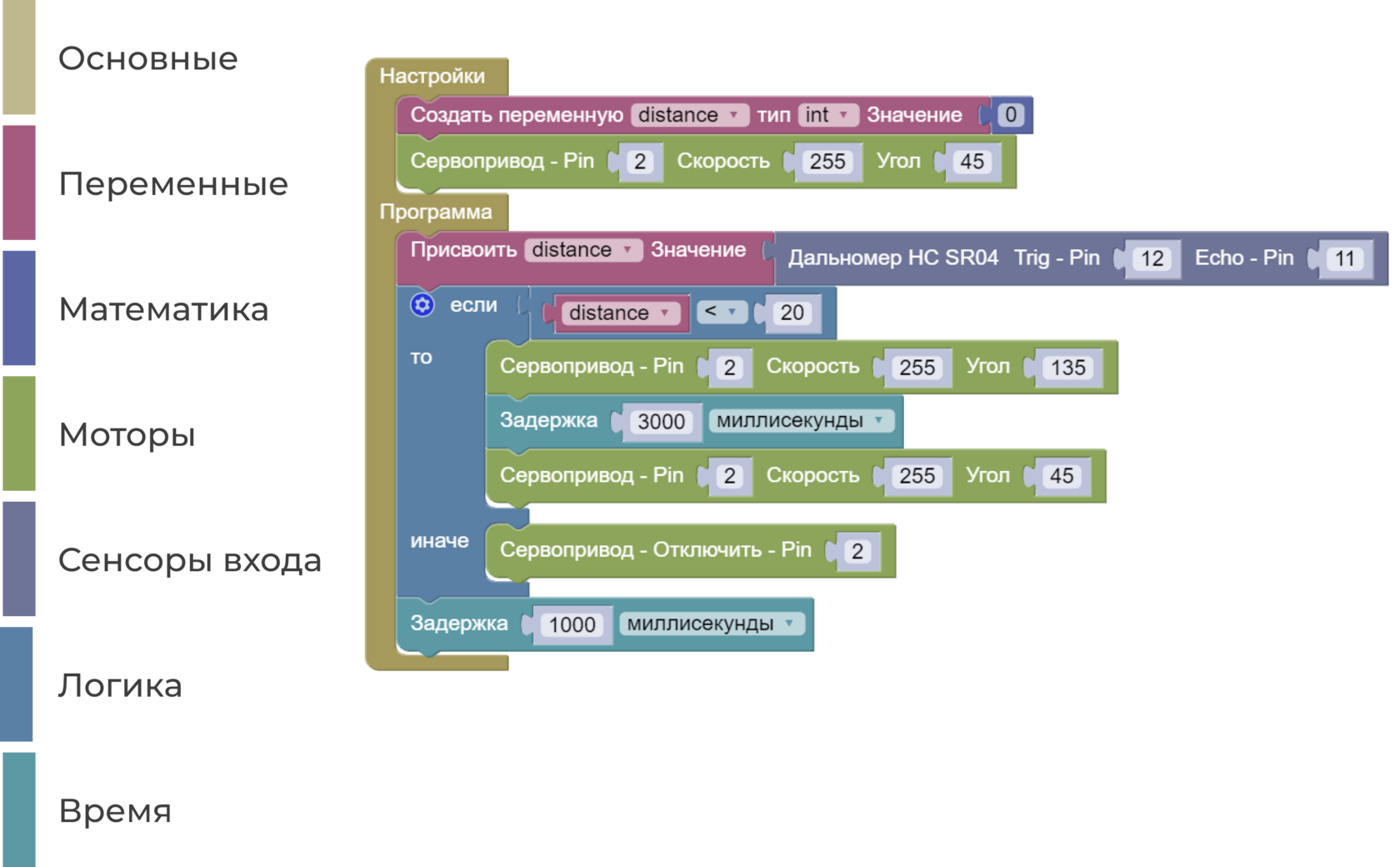
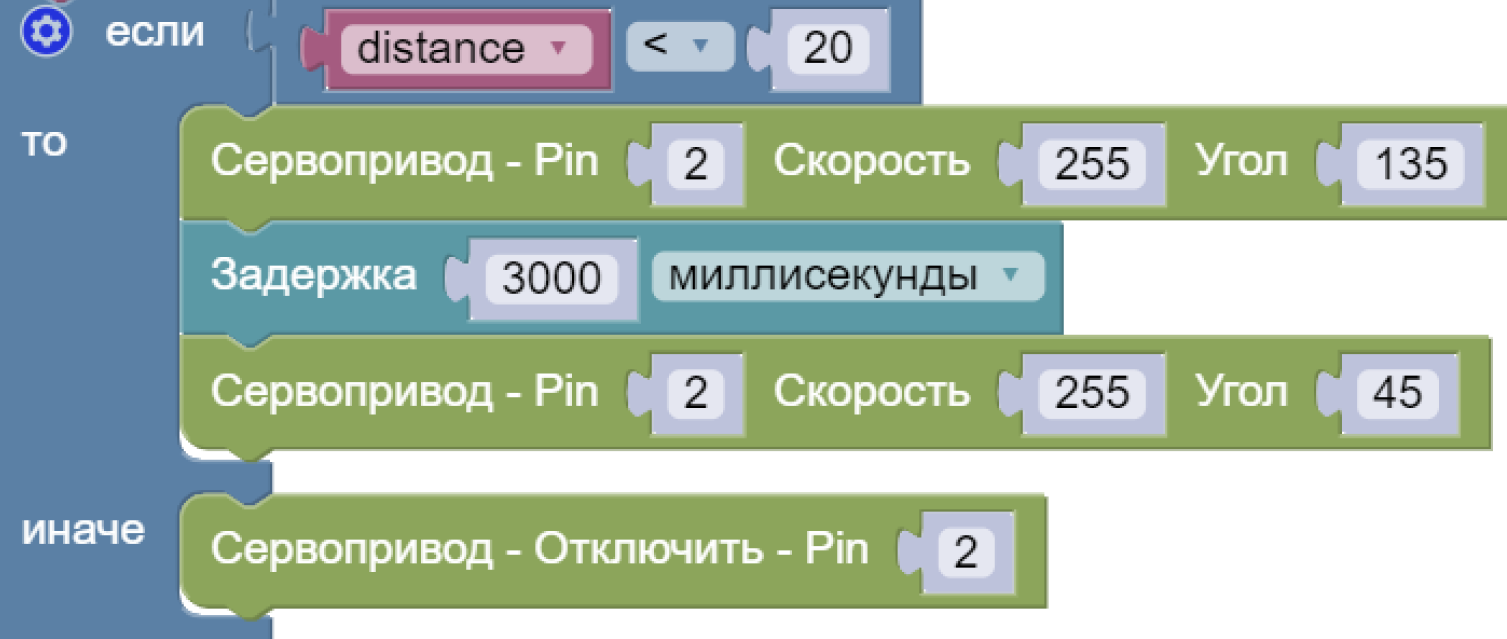
Пояснения к программному коду
- Создадим переменную целочисленного типа: для хранения расстояния «distance» и установим сервопривод в исходное положение 45 градусов.

- Присвоим переменной «distance» значение расстояния, измеренное на дальномере, подключенном к контактам 12 и 11 (Trig и Echo).

— Указываем условие (если до препятствия менее 20 см)
— Если условие верно: сервопривод перемещает картонку на 135 градусов, открывая заслонку для высыпания корма из емкости. Через 3 секунды возвращается в исходное состояние (45 градусов).
— Если условие НЕ верно: сервопривод бездействует.
— Если условие верно: сервопривод перемещает картонку на 135 градусов, открывая заслонку для высыпания корма из емкости. Через 3 секунды возвращается в исходное состояние (45 градусов).
— Если условие НЕ верно: сервопривод бездействует.