
Мобильные роботы — это устройства, которые могут перемещаться по окружающей среде и выполнять различные задачи без постоянного вмешательства человека. Такие роботы используются в различных областях, включая промышленность, здравоохранение, логистику и даже в быту. Они оснащены сенсорами, вычислительными системами и приводами, что позволяет им воспринимать окружающую среду и реагировать на неё. Мобильность этих роботов обеспечивается движущимися частями, позволяющими им преодолевать препятствия и перемещаться по заданному маршруту.

Ключевыми компонентами мобильных роботов являются контроллеры, моторы и аккумуляторы. Контроллеры — это "мозг" робота, который управляет всеми процессами: от обработки данных, получаемых от сенсоров, до управления мотором. Они могут быть как простыми микроконтроллерами, так и более сложными вычислительными устройствами, такими как Raspberry Pi или Arduino. Моторы отвечают за движение робота, и в зависимости от типа робота могут быть использованы различные моторы, например, колёсные или линейные. Эти моторы получают команды от контроллеров для передвижения в нужном направлении. Аккумуляторы обеспечивают питание робота, и они должны быть достаточно мощными для продолжительной работы, особенно для мобильных роботов, которые могут работать автономно в течение нескольких часов или дней.

Драйвер мотора — это компонент, который служит для управления мотором, преобразуя сигналы, поступающие от контроллера, в команды, которые мотор может выполнять. Он необходим для обеспечения точного и стабильного движения робота, а также для предотвращения перегрузки мотора.
Кроме того, в роботах часто используется концепция обратной кинематики. Этот алгоритм используется для вычисления положения конечностей робота, учитывая его текущую позицию и заданные движения. Обратная кинематика помогает точно контролировать движения робота, обеспечивая правильное выполнение действий, таких как захват объектов или перемещение по сложной траектории.
Кроме того, в роботах часто используется концепция обратной кинематики. Этот алгоритм используется для вычисления положения конечностей робота, учитывая его текущую позицию и заданные движения. Обратная кинематика помогает точно контролировать движения робота, обеспечивая правильное выполнение действий, таких как захват объектов или перемещение по сложной траектории.

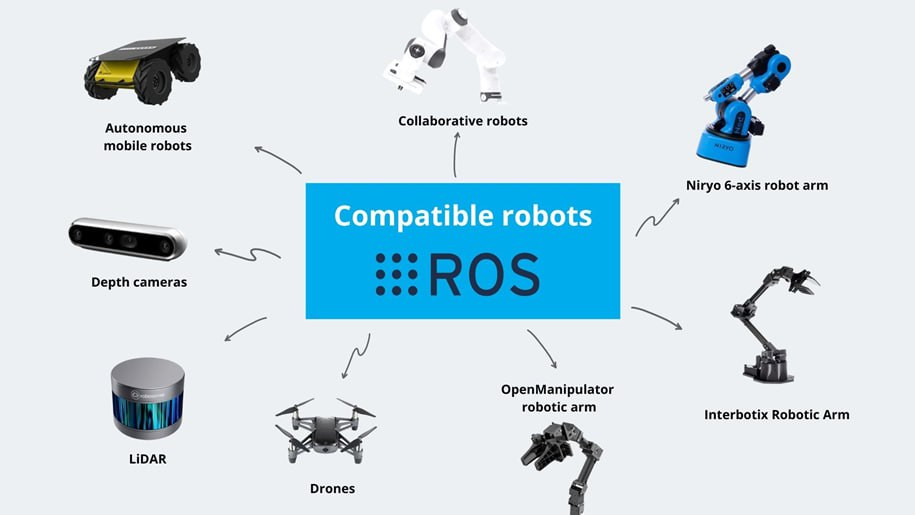
Также важным компонентом робототехнических систем является Robot Operating System (ROS) — операционная система, которая облегчает создание сложных роботизированных приложений. ROS представляет собой набор программных библиотек и инструментов, которые помогают разработчикам работать с роботами, обеспечивая интерфейсы для работы с сенсорами, моторами и алгоритмами навигации. Эта система предоставляет модульность, что позволяет интегрировать разные компоненты и быстро разрабатывать новые функции для роботов, а также облегчает их тестирование и обновление. ROS широко используется в образовательных и научных проектах, а также в коммерческих роботах.
Эти компоненты работают в совокупности, позволяя роботам выполнять сложные задачи, включая навигацию в реальном времени, обнаружение препятствий и адаптацию к изменениям окружающей среды. Современные мобильные роботы могут использовать технологии искусственного интеллекта, машинного обучения и сенсорные системы для улучшения своей функциональности и автономности.